چکیده
در 16 سپتامبر 2023، یک سیگنال لرزهای غیرمعمول با فرکانس 10.88 میلیهرتز به مدت 9 روز در سراسر جهان مشاهده شد. یک ماه بعد، سیگنال مشابهی دوباره ظاهر شد و یک هفته دیگر ادامه یافت. چندین مطالعه نظریهپردازی کردهاند که این سیگنالها توسط سیچهایی تولید شدهاند که پس از دو مگاسونامی ناشی از رانش زمین در یک آبدره در شرق گرینلند شکل گرفتهاند. این نظریه توسط وارونگیهای لرزهای و مدلسازی تحلیلی و عددی پشتیبانی میشود، اما مشاهدات مستقیمی انجام نشده است. در این مقاله، ما مشاهدات اولیه این پدیده را با استفاده از دادههای مأموریت توپوگرافی اقیانوس سطحی (SWOT) ارائه میدهیم. با حذف سایر فرآیندهای اقیانوسنگاری، نظریه سیچ نویسندگان قبلی را تأیید کرده و به طور مستقل دامنه اولیه آن را 7.9 متر با استفاده از یادگیری ماشینی بیزی و دادههای لرزهای تخمین میزنیم. این مطالعه ارزش ارتفاعسنجی ماهوارهای را برای بررسی فرآیندهای سریع اقیانوسی و رویدادهای شدید، در حالی که نیاز به روشهای تخصصی برای رفع محدودیتهای دادههای ارتفاعسنجی، یعنی پراکندگی زمانی، را نیز برجسته میکند، نشان میدهد. این دادهها و رویکردها به درک پدیدههای حدی نامشهود آینده که ناشی از تغییرات اقلیمی هستند، کمک خواهند کرد.
مقدمه
رویدادهای شدید به عنوان نتیجه مستقیم تغییرات اقلیمی در حال تکامل هستند که منجر به ظهور پدیدههای جدید و قبلاً مشاهدهنشده میشوند1,2. در مناطق دورافتادهای مانند قطب شمال، جایی که اندازهگیریهای درجا (in situ) کمیاب هستند، دانشمندان برای بررسی این رویدادها به مدلهای تحلیلی و عددی متکی هستند. با این حال، مدلسازی در چنین مناطقی به دلیل عدم قطعیت در دادههای مورد نیاز برای کالیبره کردن و اعتبارسنجی این مدلها چالشهای قابل توجهی را ایجاد میکند3. در نتیجه، اغلب سادهسازیهای بزرگی ضروری است که میتواند منجر به تفاوتهای قابل توجهی بین پدیدههای مشاهدهشده و مدلسازیشده شود.
سیگنال لرزهای بسیار طولانیمدت (VLP) مرموز 10.88 میلیهرتزی که پس از یک رانش زمین مولد سونامی در آبدره دیکسون، گرینلند، در 16 سپتامبر 2023 ظاهر شد، و تلاشهای علمی بینرشتهای متعاقب برای تعیین منشأ آن، بر این چالشها تأکید میکند. دو مطالعه مستقل4,5 فرض کردهاند که این سیگنال توسط یک موج ایستاده، یا سیچ (seiche)، که پس از سونامی شکل گرفته است، هدایت شده است. در حالی که به خوبی مستند شده است که سیچها میتوانند در حوضههای محصور و نیمهمحصور رزونانسکننده تشکیل شوند6، شیب ناشی از بارگذاری که آنها تولید میکنند تنها به صورت محلی (کمتر از 30 کیلومتر) و برای مدت زمان کوتاه (کمتر از 1 ساعت) مشاهده شده است5,7. علاوه بر این، هیچ شواهد قبلی از نوسان پایدار سیال (به مدت چندین روز) بدون یک عامل خارجی وجود ندارد. بنابراین، تضعیف 9 روزه سیگنال لرزهای VLP که در سراسر جهان شناسایی شد، بسیار غیرعادی است. حتی کنجکاویبرانگیزتر، ظهور مجدد سیگنال در 11 اکتبر 2023 بود، همانطور که در مرجع5 اشاره شده است، با تقریباً نیمی از بزرگی و مدت زمان رویداد اولیه. این تکرار با دومین رانش زمین مولد سونامی در همان شیب در آبدره دیکسون همزمان شد.
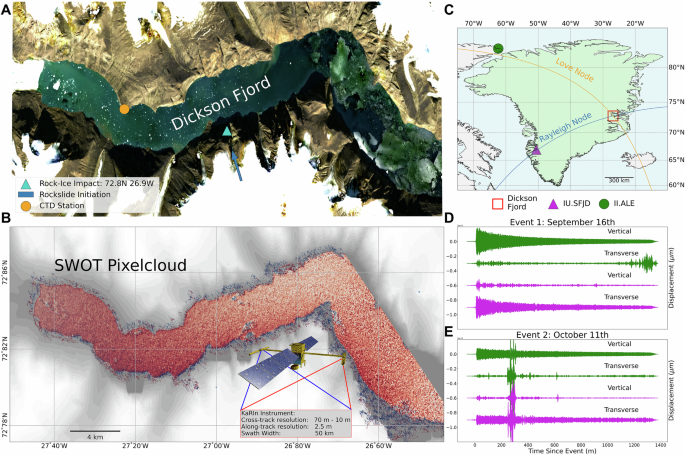
بهمنهای سنگی-یخی و سونامیهای متعاقب هر دو رویداد از طریق ترکیبی از مشاهدات ماهوارهای و میدانی به خوبی مستند شدهاند، از جمله شواهد بالا آمدن سونامی (tsunami run-up) در آبدره و حتی در ایستگاه تحقیقاتی الا \(\varnothing\)، در فاصله بیش از 72 کیلومتری4,5 (بخش "اطلاعات سونامی" و شکل تکمیلی 1). در مقابل، شواهد مربوط به سیچ، لزوماً، تنها به ترکیبی از مدلهای تحلیلی و عددی، که با مشاهدات لرزهای تکمیل شدهاند، متکی بوده است. در حالی که دامنههای لرزهای به خوبی بازتولید میشوند، تفاوتهای قابل توجهی بین این مطالعات در دامنه اولیه تخمینی سیچ (از 2.6 متر تا 7.4-8.8 متر) باقی میماند. حتی گیجکنندهتر این واقعیت است که سیچ لرزهآور توسط ارتش دانمارک در حین بررسی آبدره در 19 سپتامبر مشاهده نشد5. بنابراین، مشاهدات تجربی نه تنها برای تأیید وجود سیچ، بلکه برای اعتبارسنجی مدلها و اصلاح درک ما از دینامیک رویداد ضروری است.
برای پشتیبانی از این نتیجهگیریها که سیگنال VLP با فرکانس 10.88 میلیهرتز توسط یک سیچ در آبدره دیکسون تولید شده است، نویسندگان مراجع4 و5 دو رویکرد مستقل را به کار گرفتند. هر دو مطالعه الگوی تشعشع مشاهدهشده امواج لرزهای ریلی و لاو را با یک نیروی منفرد نوسانی عمود بر آبدره دیکسون سازگار میدانند. امواج لرزهای ریلی حرکت بیضوی و غلتشی با جابجایی عمودی و شعاعی را نشان میدهند و به صورت شعاعی از منبع منتشر میشوند. امواج لاو حرکت کاملاً عرضی عمود بر جهت انتشار خود را نشان میدهند. علاوه بر این، هر دو گروه مکانهای منبع لرزهای نزدیک آبدره دیکسون را شناسایی میکنند. در اینجا خلاصهای بسیار مختصر از روشها و شواهد اضافی ارائه میدهیم.
با انجام وارونگی لرزهای بر روی سه مجموعه از آرایههای تلهسیسمی، نویسندگان مرجع 4 نیروی عمدتاً افقی و عمود بر آبدره دیکسون را جدا میکنند. این یافته مبنایی برای یک مدل تحلیلی ساده از فیزیک نوسان با در نظر گرفتن یک هندسه آبدره مستطیلی سادهشده 2×20 کیلومتر است. با استفاده از وارونگی تکنیرویی، آنها یک نیروی افقی اولیه حدود 160 گیگانیوتن (GN) را شناسایی میکنند که منجر به دامنه اولیه تخمینی 2.6 متر میشود. در حالی که یک رویکرد مدلسازی تفاضل محدود 2 بعدی در هندسه مستطیلی سادهشده اعمال شده است، این مدل تنها برای نشان دادن این است که نوسان حالت اساسی (fundamental-mode oscillation) میتواند شکل بگیرد. تلاش زیادی برای شناسایی عوامل فیزیکی میرایی مشاهدهشده صورت گرفته است که به دلیل عدم نیاز رویکرد ما به آنها، بیشتر در موردشان بحث نمیکنیم.
تیم بزرگ بینرشتهای در مرجع 5 از ترکیبی از شبیهسازی عددی با رزولوشن بالا و مدلسازی تحلیلی برای تأیید ادعاهای خود استفاده میکنند. دو رویکرد عددی در نظر گرفته شده است، با این حال، رویکرد ترجیحی آنها از یک مدل هیدرواستاتیکی غیرخطی پیادهسازی شده در HySea8 استفاده میکند که رانش زمین را به عنوان یک جریان دانهای در نظر میگیرد. با استفاده از فاصله شبکهای ریز 3 متری، شبیهسازی پس از حدود 5 دقیقه به یک سیچ با میرایی کند با دامنه اولیه 7.4 متر تثبیت میشود. قابل ذکر است که اولین حالت ویژه فرکانس نوسانی 11.45 میلیهرتز (85 ثانیه) دارد، که با فرکانس سیگنال VLP مشاهدهشده 10.88 میلیهرتز (92 ثانیه) متفاوت است. سپس از این شبیهسازی عددی به عنوان یک تابع زمان منبع برای تولید شکلموجهای لرزهای جهانی استفاده میشود. از طریق مقایسه مستقیم پوشش شبیهسازیشده، نویسندگان توافق خوبی بین تضعیف سیگنال مصنوعی و مشاهدهشده پیدا میکنند. همچنین از یک مدل تحلیلی با هندسهای سادهشده واقعیتر نسبت به مرجع 4 استفاده میشود. نویسندگان نیروی اولیه را 500 گیگانیوتن (GN) شناسایی میکنند، که به طور قابل توجهی بزرگتر از تخمین 160 گیگانیوتن در مرجع 4 است. این امر منجر به دامنه اولیه تخمینی سیچ 8.8 متر میشود.
در حالی که هر دو مطالعه شواهد قانعکنندهای ارائه میدهند که منبع سیگنال پایدار 10.88 میلیهرتز یک سیچ با منشأ آبدره دیکسون بوده است، مقادیر بسیار متفاوتی برای دامنه اولیه سیچ به دست آمده است (2.6 متر در مقابل 7.4-8.8 متر). هر دو مطالعه این تفاوتها را به اثرات مدلنشده نسبت میدهند. ما خاطرنشان میکنیم که هر دو مطالعه هندسههای آبدره سادهشده بسیار متفاوتی را در نظر میگیرند، برای مثال، مرجع 4 عرض آبدره را 2 کیلومتر و طول آن را 20 کیلومتر فرض میکند، و مرجع 5 عرض 2.7 تا 2.88 کیلومتر (بسته به شکل) و طول 10 کیلومتر را فرض میکند. به طور طبیعی، این انتخابها منجر به تخمینهای تحلیلی متفاوتی از دامنههای سیچ خواهد شد.
در اینجا، ما یک رویکرد کاملاً متفاوت را ارائه میدهیم—با استفاده از مشاهدات اولیه این پدیده برای پاسخ به این سوالات. با استفاده از این دادهها در کنار مشاهدات لرزهای، ما دامنههای اولیه رویدادهای سیچ سپتامبر و اکتبر را تخمین میزنیم و این نتایج را با مطالعات قبلی مقایسه میکنیم. این مشاهدات و تخمینها شواهد قاطعی برای وجود این پدیده ارائه میدهند.
مأموریت توپوگرافی اقیانوس سطحی (SWOT)
بر خلاف دستگاههای درجا (in-situ)، ارتفاعسنجی ماهوارهای اندازهگیریهای تقریباً جهانی را ارائه میدهد، هرچند با یک مصالحه اجتنابناپذیر در نمونهبرداری زمانی9. پس از بیش از 30 سال، این دادهها درک ما را از بسیاری از فرآیندهای اقیانوسی و اقلیمی متحول کردهاند10. با این حال، چالشهای قابل توجهی در مطالعه رویدادهای شدید به دلیل ترکیبی از پراکندگی زمانی و ماهیت تکبعدی مشاهدات به وجود میآیند. ارتفاعسنجهای متعارف نادیر (Nadir) دادهها را مستقیماً زیر فضاپیما نمونهبرداری میکنند و پروفیلهای 1 بعدی در امتداد سطح دریا تولید میکنند. این نمونهبرداری به شدت توانایی نتیجهگیری در مورد دینامیک فضایی پدیدههای شدید را محدود میکند و اغلب رویدادها را به طور کلی مشاهده نشده باقی میگذارد.
مأموریت توپوگرافی اقیانوس سطحی (SWOT) با پهنای باند وسیع، که در 15 دسامبر 2022 پرتاب شد، بسیاری از این کاستیها را برطرف کرده است11. برخلاف ارتفاعسنجهای نادیر متعارف، ابزار KaRIn بر روی SWOT اندازهگیریهای 2 بعدی با وضوح فوقالعاده بالا از سطوح اقیانوس را تا 50 کیلومتر در هر طرف فضاپیما ارائه میدهد12. SWOT اندازهگیریهای با دقت بالا را مستقیماً تا خطوط ساحلی و به طور منحصر به فرد در آبدرهها ارائه میدهد، با وضوح مؤثر «ابر پیکسلی» (pixelcloud) 2.5 متر در امتداد مسیر و وضوح متغیر از 10 متر تا 70 متر در جهت عرضی11. این اندازهگیریها دارای نویز ابزاری پایینتر از 0.4 سانتیمتر هستند13. مروری بر این ویژگیهای نمونهبرداری و مثالی از یک عبور تکی SWOT از آبدره دیکسون در شکل 1C نشان داده شده است. ابر پیکسلی شامل بیش از 300,000 اندازهگیری است و پوشش کاملی از منطقه مورد مطالعه را فراهم میکند.
پس از انتقال به فاز مدار علمی مأموریت SWOT، این مأموریت چندین مشاهده از آبدره دیکسون را مدت کوتاهی پس از وقوع هر دو رانش زمین مولد سونامی انجام داد. برای رویداد 16 سپتامبر، این عبورها 0.5 روز، 1.5 روز و 4.8 روز پس از توسعه VLP اتفاق افتادند. برای رویداد 11 اکتبر، تنها یک عبور "قابل استفاده" 0.5 روز پس از شروع VLP وجود داشت.


مشاهدات تجربی
مشاهدات ابرپیکسلی SWOT از آبدره دیکسون برای هر دو رویداد سپتامبر و اکتبر در شکل 2 نشان داده شده است. برای مشاهده 12 اکتبر (0.5 روز پس از سونامی)، یک شیب عرضی بزرگ منفی (نسبت به خط \(\overline{{X}_{1}{X}_{2}}\)) در سراسر محور فرعی آبدره قابل مشاهده است. در اینجا ما محور طولی آبدره را محور اصلی و محور فرعی را عمود بر آن مینامیم. در حالی که برخی از نویزهای مصنوعی در حدود 27 درجه غربی وجود دارد، توزیع فضایی گرههای رزونانسی به خوبی با شبیهسازی سونامی با رزولوشن بالا در مرجع5 مطابقت دارد.
متأسفانه، نویزهای قوی بخشهای زیادی از مشاهدات 17 و 18 سپتامبر را مخدوش میکنند. با این حال، در 17 سپتامبر (0.5 روز پس از سونامی)، یک شیب عرضی کانال میتواند مشاهده شود که همفاز با مشاهدات 11 اکتبر و 18 سپتامبر نیست. به دلیل نویزهای موجود در 18 سپتامبر، تخمین شیبها دقیق نیست. شرحی از منابع احتمالی این نویزها در بخش "دادهها و پردازش SWOT" ارائه شده است. مشاهدات 21 سپتامبر تقریباً هیچ نویز مصنوعی ندارند و شیب عرضی کانال منفی بسیار کمی را نشان میدهند. توزیع فضایی گرهها با گرههای مشاهدهشده در 12 اکتبر و شبیهسازی سونامی در مرجع5 سازگار است. ما خاطرنشان میکنیم که تفاوتهای قابل توجهی بین سطح دریا شبیهسازیشده و مشاهدهشده وجود دارد، به ویژه در قسمتهای بالایی آبدره. در اینجا، مشاهدات SWOT حاکی از وجود یک تجمع پایدار آب است که به دلیل انتخابهای مرزی مدلسازی نشده است.

نسبتدهی لرزهای
دادههای SWOT به تنهایی نمیتوانند دامنه کل سیچ را تخمین بزنند، زیرا مشاهدات میتوانستند در هر فاز از دوره نوسان رخ داده باشند. برای غلبه بر این مشکل، مشاهدات SWOT به دادههای لرزهای از ایستگاه لرزهای II.ALE واقع در 82.5033°N 62.3500°W (1322.9 کیلومتر فاصله) ارجاع داده میشوند. ایستگاه II.ALE مستقیماً در کنار گره لاو قرار دارد و بنابراین تقریباً به طور انحصاری توسط امواج ریلی مشخص میشود، همانطور که در شکلهای 1B و 1D نشان داده شده است. جابجایی عمودی اندازهگیری شده در II.ALE بین 10 و 13 میلیهرتز فیلتر شده و برای هر دو رویداد در شکلهای 3A و 3B نشان داده شده است. مشاهدات SWOT به عنوان خطوط عمودی نشان داده شدهاند. ما سرعت فاز 4.03 کیلومتر بر ثانیه را با استفاده از مدل زمین ناهمگن14 و فاصله تقریبی از منبع لرزهای 1409.5 کیلومتر که با استفاده از همان مدل زمین ناهمگن محاسبه شده است (برای جزئیات به بخش "نسبتدهی لرزهای" مراجعه کنید، و شکل تکمیلی 1 برای موقعیت نسبی) تخمین میزنیم. تخمینهای عدم قطعیت در این مقدار، و همچنین اعتبارسنجی با استفاده از دادههای مصنوعی نیز در بخش "نسبتدهی لرزهای" ارائه شده است. بزرگی نسبی و فاز سیچ را میتوان مستقیماً از طریق مقایسه با حرکت مشاهده شده زمین تعیین کرد. نمایههایی از سیگنال عمودی VLP مشاهده شده با برجستهسازی مشاهدات SWOT در شکلهای 3C تا 3F نشان داده شدهاند. شیبهای عرضی مشاهده شده توسط SWOT، محاسبه شده بین نقاط X1 و X2 که منجر به این سیگنالها شدهاند، مستقیماً در زیر در شکلهای 3G تا 3J رسم شدهاند. شیبهای عرضی مشاهده شده به خوبی با جابجایی عمودی تولید شده در ایستگاه II.ALE مطابقت دارند. یعنی شیبهای عرضی منفی (از X1 به X2) با جابجایی عمودی منفی و بالعکس مرتبط هستند. مقادیر نیز توافق خوبی را نشان میدهند. ما خاطرنشان میکنیم که این دقیقاً همان چیزی است که از نیروی افقی تولید شده توسط نوسان سیچ انتظار میرود (بخش "سیچ تحلیلی ساده")5.
برای اعتبارسنجی این مشاهدات، از سیگنال VLP نرمالشده برای تخمین دامنه اولیه سیچ استفاده میشود. شیبهای تخمینزده شده با استفاده از یک مدل خطی بیزی (بخش "رگرسیون بیزی") محاسبه میشوند. تخمینهای عدم قطعیت در سطح پارامتر، به همراه تخمینهای محتوای نویز دادهها به دست میآیند. با توجه به اینکه هر مطالعه عرض و طول متفاوتی برای آبدره فرض میکند، ما هر تخمین را بر اساس شیب عرضی کانال متناظر با حداکثر دامنه (MXCS) در نظر میگیریم. برای مرجع 5، تخمین دامنه اولیه 7.4-8.8 متر به یک MXCS معادل 2.56-3.13 متر بر کیلومتر ترجمه میشود، و تخمین دامنه اولیه 2.6 متر توسط مرجع 4 یک MXCS معادل 1.3 متر بر کیلومتر را به دست میدهد. با استفاده از مشاهدات SWOT از 17 سپتامبر، ما MXCS را 1.83 ± 0.59 متر بر کیلومتر تخمین میزنیم. این مقدار بین تخمینهای هر دو مطالعه قبلی قرار میگیرد، با این حال، تخمین تحلیلی توسط مرجع 4 در پایینترین نقطه از بازههای اطمینان قرار دارد، و تخمین عددی از مرجع 5 کمی خارج از بالای آن است. دادههای 18 و 21 سپتامبر به دلیل عدم قطعیتهای نسبی زیاد و امتیازات پایین R2 بیزی15 استفاده نشدند (به بخش "رگرسیون بیزی" مراجعه کنید). برای رویداد اکتبر، MXCS را 1.37 ± 0.13 متر بر کیلومتر تخمین میزنیم. این واقعیت که مشاهدات 12 اکتبر نزدیک یک حداقل محلی در نوسان سیچ رخ دادهاند، امکان تخمین عدم قطعیت دقیقتری را فراهم میکند.

رد کردن سایر مظنونین
در حالی که دادههای SWOT نگاه بیسابقهای به سطوح آنی آب در آبدره دیکسون ارائه میدهند، تنها یک "عکس فوری" است. شیبهای عرضی مشاهدهشده با انتظار ما از یک موج ایستاده که عمود بر محور اصلی آبدره نوسان میکند، مطابقت دارند. با این حال، پدیدههای ژئوفیزیکی دیگری نیز وجود دارند که میتوانند منجر به شیبهای عرضی بزرگ در حوضههای بسته شوند، یعنی جزر و مد16 و گردش ناشی از باد (جابجایی اکمن)17. به هر یک از این علل احتمالی توجه میشود.
جزر و مد
در حالی که جزر و مد آشکارا منبع سیگنال لرزهای 92 ثانیهای نیست، به دلیل پراکندگی اندازهگیریهای SWOT، شیبهای عرضی کانال ناشی از جزر و مد میتوانند منجر به نتایج نادرست در مورد وجود یک سیچ در دادههای SWOT شوند. از آنجایی که تنها یک ایستگاه جزر و مد در منطقه وجود دارد، اطلاعات درجا کافی برای رد این موضوع وجود ندارد. علاوه بر این، آبدرههای کوچک توسط مدلهای جزر و مد جهانی پیشرفته به دلیل درونیابی به خوبی تفکیک نمیشوند و بنابراین نمیتوان به آنها تکیه کرد18,19. در عوض، ما دادههای ابر پیکسلی SWOT را که در طول سال پس از دو رویداد به دست آمدهاند، با استفاده از یک رویه تحلیل هارمونیک بیزی از لحاظ فضایی منسجم20 مستقیماً تحلیل میکنیم. نشان داده شده است که این رویه تخمین جزر و مد را نسبت به رویکردهای متعارف حداقل مربعات برای سریهای مرجع پراکنده و در مناطق ساحلی پیچیده بهبود میبخشد. شرح کاملی از پیادهسازی ما در بخش "تخمین جزر و مد" آورده شده است.
همانطور که در مرجع 4 اشاره شد، یک تعدیل حدود 6 ساعته در سیگنال لرزهای قابل مشاهده است. در حالی که این پدیده با جزر و مد مرتبط به نظر میرسد، رفتار واقعی آن بر خلاف چیزی است که از یک موج متحرک ساده انتظار میرود. یک مکانیسم پیشنهادی برای این پدیده در بخش "تعدیل جزر و مدی سیچ" ارائه شده است.
جابجایی اکمن (Ekman transport)
جابجایی اکمن (Ekman transport) در نتیجه تنش پایدار ناشی از باد رخ میدهد21. در نیمکره شمالی، اثر کوریولیس باعث میشود آب 90 درجه در جهت عقربههای ساعت نسبت به جهت باد حادثه منتشر شود. ما سرعت و جهت باد را از ایستگاه جوی CTD که در شکل 1A نشان داده شده است، ارزیابی میکنیم. نتایج در شکل 5 نشان داده شده است. مشاهدات در طول مدت سیگنال VLP اول در سپتامبر نشان میدهد که تمام اندازهگیریهای SWOT پس از دورههای پایدار بادهای جنوبی با سرعت حدود 5 گره رخ دادهاند. این تنش بادی میتواند منجر به تجمع آب در جهت غربی شود، اما نباید شیب عرضی کانال را ایجاد کند. مشاهدات در 12 اکتبر نیز به دنبال یک دوره پایدار دیگر از باد جنوبی است، این بار با بزرگی بیشتر حدود 10 گره. مشاهدات SWOT زمانی رخ میدهد که باد در حال تغییر جهت با بزرگی کم (کمتر از 5 گره) است. در حالی که بادهای پایدار در جهت شمال غربی میتوانند منجر به شیبهای عرضی کانال شوند، بزرگی کم و مدت کوتاه این تغییر بعید است که منجر به شیب عرضی کانال بزرگ (2 متر) مشاهده شده شود.
بحث
مطالعه ما شواهد مشاهدهای مستقیمی از سیچ در آبدره دیکسون ارائه میدهد. بر اساس نسبتدهی لرزهای و حذف سیستماتیک سایر پدیدههای دینامیکی، نتیجه میگیریم که تغییرپذیری مشاهدهشده در دادههای SWOT با یک سیچ در حال میرایی کند سازگار است. بنابراین، این مطالعه شواهد عددی و تحلیلی ارائه شده در مراجع 4، 5 را تأیید میکند که سیگنال VLP مشاهدهشده جهانی که در 16 سپتامبر 2023 منشأ گرفت، به دلیل سیچی بود که پس از یک مگاسونامی تشکیل شد. علاوه بر این، نتیجه میگیریم که سیگنال VLP کوچکتر مشاهدهشده در 11 اکتبر نیز یک سیچ بود که از یک سونامی کوچکتر در همان آبدره منشأ گرفت. قابل ذکر است که تاکنون سیچی با دوره کوتاه که برای چندین روز بدون محرک خارجی پایدار بماند، مشاهده نشده بود.
با استفاده از یک رویکرد تجربی و کاملاً مستقل، ما حداکثر شیب عرضی کانال (MXCS) سیچ سپتامبر را 1.83 ± 0.59 متر بر کیلومتر تخمین میزنیم. این مقدار بین تخمین تحلیلی مرجع 4 با 1.3 متر بر کیلومتر و تخمینهای عددی/تحلیلی مرجع 5 که از 2.56 تا 3.13 متر بر کیلومتر متغیر هستند، قرار میگیرد. به دلیل عدم قطعیت نسبتاً زیاد، تخمین تجربی ما – هنگامی که به تنهایی در نظر گرفته میشود – بینش محدودی را در مورد مقدار اولیه واقعی ارائه میدهد. با این حال، تحلیل ما از سیگنال VLP اکتبر تخمینی از MXCS سیچ اکتبر را در 1.37 ± 0.13 متر بر کیلومتر تولید کرد. عدم قطعیت کمتر در این مورد، به دلیل وقوع مشاهده 12 اکتبر در نزدیکی یک حداقل محلی از جابجایی عمودی، اطمینان بیشتری را در این تخمین میدهد.
دادههای لرزهای از ایستگاههای II.ALE و IU.SFJD نشان میدهند که بزرگی اولیه سیگنال VLP اکتبر تقریباً دو برابر رویداد سپتامبر بوده است (3 میکرومتر در مقابل 1.5 میکرومتر در II.ALE). از آنجایی که نیروی افقی متناسب با شیب عرضی کانال متوسط است (به بخش "سیچ تحلیلی ساده" مراجعه کنید)، ما تخمین دومی از MXCS سپتامبر را 2.74 ± 0.26 متر بر کیلومتر ارائه دادیم. این مقدار به خوبی با تخمینهای عددی و تحلیلی 2.56-3.13 متر بر کیلومتر گزارش شده توسط مرجع 5 همخوانی دارد. بنابراین، بر اساس بزرگیهای نسبی دو نیرو در ایستگاههای لرزهای مجاور و تخمین قوی رویداد 12 اکتبر، نتیجه میگیریم که تخمینهای عددی و تحلیلی مرجع 5 با دادههای واقعی مطابقت خوبی دارند. علاوه بر این، ما استدلال میکنیم که تخمین ارائه شده در مرجع 4 احتمالاً مقدار واقعی را به دلیل عدم دقت در هندسه آبدره فرضشده و دستکم گرفتن نیروی اولیه تنها 160 گیگانیوتن (GN)، کمتر از حد واقعی تخمین میزند. اگر عرض متوسط آبدره را 2.88 کیلومتر در نظر بگیریم، همانطور که در مرجع 5 آمده است، تخمین تجربی ما نشان میدهد که سونامی به یک سیچ اولیه با ارتفاع 7.9 متر تثبیت میشود.
این مطالعه ارزش ارتفاعسنجی ماهوارهای با پهنای باند وسیع را در توصیف رویدادهای شدید و پدیدههای اقیانوسی به طور کلی برجسته میکند. سیچها به دلیل دورههای کوتاه خود، همواره از طریق ارتفاعسنجهای متعارف به سختی قابل مطالعه بودهاند. وضوح مکانی SWOT فرصتهایی را در این زمینه، و همچنین برای مطالعه سایر فرآیندهای سریع اقیانوسی مانند خیز طوفان و حتی امواج بزرگ، فراهم میکند. همانطور که نشان داده شد، این دادهها فرصت اتصال و درک تعاملات پیچیده بین تغییرات اقلیمی و اجزای مختلف ژئوسفر را نیز فراهم میکنند. با این حال، این کار همچنین بر اهمیت روشهای تخصصی و بینرشتهای برای رفع محدودیتهای ذاتی این دادهها، به ویژه چالشهای ناشی از پراکندگی زمانی، تأکید میکند. دادههای SWOT در سطح پردازش فعلی خود، کار با آنها آسان نیست. تلاشهای متمرکزی برای بهبود بازپردازش این دادهها در آبدرهها مورد نیاز است. علاوه بر این، ابزارهای منبع باز که شکاف بین دادههای خام و خطوط لوله تحلیل را پر میکنند، برای فعال کردن کاربران غیرمتخصص برای استفاده از این دادهها ضروری هستند.
در حالی که دادههای مشاهداتی و بستر دریا کافی برای بازسازی دینامیک سیچ مشاهدهشده به صورت عددی وجود داشت، برای بسیاری از مناطق دورافتاده اینگونه نیست3. در واقع، در حالی که اثرات تغییرات اقلیمی در سطح جهانی احساس میشود، بزرگترین و سریعترین تغییرات اغلب در این مناطق رخ میدهد22. بنابراین، در حالی که ما ادعاهای نویسندگان قبلی در مورد نیاز به حسگرهای بیشتر سطح دریا درجا (in-situ) را تکرار میکنیم، معتقدیم که پیگیری مأموریت SWOT و سرمایهگذاری در مأموریتهای آتی ارتفاعسنجی با پهنای باند وسیع و در حالت ایدهآل غیرهمزمان با خورشید نیز برای نظارت بر این اثرات حیاتی است. بیش از هر چیز، طراحی مدارها برای دستیابی به نمونهبرداری زمانی بالاتر در عرضهای جغرافیایی پایینتر باید در اولویت قرار گیرد، زیرا در حال حاضر مطالعه پدیدههای حدی را محدود میکند. علاوه بر این، تأکید میکنیم که یک ابزار کلیدی برای شناسایی این رویدادها، محاسبه دقیق ناهنجاریهای سطح دریا (SLA) با اعمال تصحیحات ژئوفیزیکی مختلف است. به دلیل هندسههای پیچیده و باریک آبدرهها، و کمبود اندازهگیریهای ارتفاعسنجی تاریخی، تخمینهای جزر و مد در این مناطق ضعیف است18. علاوه بر این، ما دریافتیم که حتی زمانی که تخمینهای دقیق SLA قابل دستیابی هستند، میانگین SLA آبدره نشانههایی از سیچینگ را نشان نمیدهد. این بر اهمیت در نظر گرفتن واریانسهای مکانی کوچک تأکید میکند که SWOT و مأموریتهای آتی ارتفاعسنجی با پهنای باند وسیع پتانسیل پرداختن به آنها را دارند.
روشها
دادهها و پردازش SWOT
دادههای ابر پیکسلی از مأموریت SWOT از طریق دسترسی آزاد به دادههای زمین (Earth Access) به دست آمدهاند (آخرین دسترسی در 3 فوریه 2025). ما از دادههای ابر پیکسلی با وضوح بالا نسخه 2.0، با نام کوتاه "SWOT_L2_HR_PIXC_2.0" در API Earth Access استفاده میکنیم. دادههای ابر پیکسلی با نرخ بالای SWOT همچنین در دسترس هستند در: https://doi.org/10.5067/SWOT-PIXC-2.0. لازم به ذکر است که تمام دادههای استفاده شده در این مقاله نیز در مواد بازتولید گنجانده شدهاند. در زمان دسترسی، دادههای سطح 2.0 بالاترین سطح پردازشی موجود را تشکیل میدهند. رانشهای زمین آبدره دیکسون در سپتامبر و اکتبر 2023 مدت کوتاهی پس از انتقال SWOT به فاز علمی رخ دادند. فاز علمی SWOT با یک مدار تکراری 20.86 روزه با زیرچرخههای 10 روزه مشخص میشود. مدار با شیب 77.6 درجه است و بنابراین غیرهمزمان با خورشید است که باعث کاهش اثر همپوشانی جزر و مد میشود. یکی از نتایج زیرچرخههای 10 روزه این است که اندازهگیریهای تکراری در گروههایی رخ میدهند که منجر به شکافهای اندازهگیری نسبتاً کوتاهی در برخی از بخشهای چرخه و شکافهای کامل در بقیه میشود. دادههای رویدادهای سپتامبر و اکتبر با فیلتر کردن تمام عبورهای موجود بین 16-26 سپتامبر و 10-18 اکتبر به دست آمدند. ما تمام عبورهایی را انتخاب میکنیم که در محدوده مشخص شده در جدول S1 قرار میگیرند. برای دوره سپتامبر، این امر منجر به 5 عبور اولیه میشود که به ترتیب 0.5 روز، 2 روز، 3 روز، 4 روز و 5 روز پس از رویداد رخ میدهند. به طور مشابه، برای دوره اکتبر، 2 عبور اولیه در 0.5 روز و 6 روز پس از سونامی شناسایی میشوند. ما دادههای SWOT را در دو مرحله پردازش میکنیم، ابتدا از طریق بازرسی دستی و سپس با استفاده از یک رویه پیشپردازش استاندارد.
بازرسی دستی
پیش از پردازش هر عبور، یک بازرسی دستی انجام میدهیم. به دلیل محدودیتهای الگوریتمهای پردازش L2 اعمال شده بر روی دادههای SWOT، کل عبورها میتوانند تا حدی آلوده شوند که دادهها غیرقابل استفاده شوند. مثالی از این آلودگی را میتوان در شکل تکمیلی 2 مشاهده کرد. این خطاها به وضوح بصری هستند و به صورت دستی علامتگذاری و از طریق بازرسی بصری حذف میشوند. این امر منجر به مجموعه نهایی مشاهدات برای رویداد سپتامبر (0.5 روز، 2 روز و 5 روز) و تنها یک مشاهده برای رویداد اکتبر (0.5 روز پس از سونامی) میشود.
پردازش دادهها
تمام تصحیحات ژئوفیزیکی استاندارد، از جمله تأخیرهای تروپوسفر مرطوب و خشک و تصحیحات گذرگاه، اعمال میشوند. برخلاف مدار Cal/Val SWOT، تصحیح گذرگاه برای فاز علمی به دلیل کاهش قابل توجه زمان بین گذرگاهها بسیار دقیقتر است. تصحیحات ژئوئیدی بر اساس مدل ژئوئید EGM2008 اعمال میشوند. به دلیل خطاهای درونیابی با تصحیحات جزر و مد پیشفرض FES2022، یک رویکرد تخصصی برای مدیریت جزر و مد مورد نیاز است. بحث جامع در مورد نحوه برخورد با جزر و مد در بخشهای "تخمین جزر و مد" و "اعتبارسنجی جزر و مد" ارائه شده است. پس از اعمال تصحیحات ژئوفیزیکی، تمام مقادیر اندازهگیری با ارتفاع سطح دریا بیش از ±4 متر را فیلتر میکنیم. این آستانه به صورت تجربی و پس از بازرسی دستی مجموعه دادههای مورد استفاده برای تخمین جزر و مد تعیین شد. به دلیل مشکلات بازپردازش، مشاهدات جعلی در آبدره وجود دارد که از این آستانه 4 متر فراتر میروند و بنابراین برای جلوگیری از سوگیری تخمینها فیلتر میشوند. برای دستیابی به نقشههای ارتفاع سطح دریا یکنواخت از نظر بصری که میتوانند بین عبورها مقایسه شوند، مرکز هر نقشه رنگی را نقطه میانی شیب عرضی کانال قرار میدهیم. به دلیل عدم دقتهای جزئی در تصحیحات جزر و مد که در بخشهای "تخمین جزر و مد" و "اعتبارسنجی جزر و مد" توضیح داده شده است، این روش را قویتر یافتیم.
محاسبه شیب عرضی کانال
به دلیل وجود نویزهای مصنوعی در برخی از اندازهگیریهای SWOT، برای تحلیل خود به تخمین شیب عرضی کانال بین نقاط X1 و X2 متکی هستیم. لازم به ذکر است که برش بین این نقاط عمود بر هر دو محور طولانی آبدره و گره لاو نشان داده شده در شکل 2 است. در نتیجه نمونهبرداری غیریکنواخت دادههای ابر پیکسلی، تعریف یک تلرانس ضروری است که تعریف میکند یک نقطه تا چه حد میتواند از مقطع عرضی تعریف شده فاصله داشته باشد تا در نظر گرفته شود. ما با چندین مقدار تلرانس آزمایش کردیم اما به مقدار 333 متر در هر طرف مقطع عرضی تعریف شده رسیدیم. مثالی از این موضوع در شکل تکمیلی 3 نشان داده شده است، با حدود 8000 اندازهگیری. این انتخاب یک نوار نماینده 666 متری (حدود 5 درصد طول آبدره) را برای تخمین تغییرپذیری/عدم قطعیت شیب عرضی کانال فراهم میکند. شرح مدل خطی بیزی به کار گرفته شده برای این رویه در بخش "رگرسیون بیزی" ارائه شده است.
دادههای SWOT برای تخمین جزر و مد
دادههای ابرپیکسلی همچنین برای تخمین جزر و مد M2 در سراسر آبدره دیکسون استفاده میشوند. به دلیل همپوشانی شدید ناشی از نمونهبرداری زمانی نامنظم، هنگام انجام تحلیل هارمونیک جزر و مد، دقت بسیار زیادی لازم است20. وجود یخ دریایی در زمستان مشکلات بیشتری را ایجاد میکند، زیرا گنجاندن این دادهها به شدت دقت تخمین جزر و مد را کاهش میدهد. مانند قبل، تمام عبورهایی را که با منطقه مورد مطالعه (جدول S1) بین 20 اکتبر 2023 و 1 نوامبر 2024 تلاقی دارند، پیدا میکنیم. این امر یک مجموعه داده اولیه شامل 241 عبور را به دست میدهد. پس از فیلتر دستی و حذف عبورهای حاوی یخ دریایی، تنها 23 عبور با کیفیت بالا باقی میماند که برای تخمین جزر و مد استفاده میشوند. ما همان تصحیحات ژئوفیزیکی را مانند قبل اعمال میکنیم. برای به دست آوردن سریهای زمانی که میتوانند به تحلیل هارمونیک بیزی با انسجام فضایی ما وارد شوند، دادههای ابر پیکسلی با نمونهبرداری نامنظم را به یک شبکه ثابت با وضوح 100 متر × 100 متر دستهبندی میکنیم. آزمایشها در وضوحهای مختلف انجام شد و مشخص شد که این روش تعادل خوبی بین وضوح بالا و کاهش حساسیت به نویز ایجاد میکند. نقاط داده در هر سطل میانگینگیری میشوند. تعداد کل دادهها در هر سطل متغیر است، بنابراین، ما تحلیل خود را به سطلهایی که حداقل 23 اندازهگیری دارند محدود میکنیم. این آستانه بر اساس این واقعیت به صورت تجربی تعریف شده است که استفاده از کمتر از 23 اندازهگیری در آزمایش، تخمینهای جزر و مد جعلی را در برخی مناطق تولید میکند.
دادههای لرزهای
دادههای لرزهای با استفاده از سرویس وب client for Obspy از فدراسیون شبکههای لرزهای دیجیتال (Federation of Digital Seismic Networks) قابل دسترسی هستند23. از آنجایی که هر دو مرجع 4 و5 یک تحلیل جامع از سیگنال لرزهای طولانیمدت ارائه میدهند، ما تصمیم گرفتیم بر روی دو ایستگاه نماینده تمرکز کنیم: II.ALE24 و IU.SFJD25. برای جداسازی انرژی مرتبط با VLP، دادهها پس از فیلتر باندگذر بین 10 و 12 میلیهرتز نمایش داده شدهاند. تمام پارامترهای فیلترینگ اضافی مورد نیاز برای بازتولید نتایج ما در نوتبوک "seismic_attribution.ipynb" ارائه شدهاند.
نسبتدهی لرزهای
نسبتدهی لرزهای با استفاده از دادههای ایستگاه لرزهای II.ALE انجام میشود. این ایستگاه در فاصله 1322.9 کیلومتری از منبع رانش زمین در 82.5033 درجه شمالی و 62.3500 درجه غربی واقع شده است. ایستگاه مستقیماً در کنار گره لاو (160 درجه) قرار دارد که عمود بر محور اصلی آبدره (شکل 1B) است. در نتیجه، این ایستگاه تقریباً به طور انحصاری امواج ریلی را دریافت میکند که توسط جزء عمودی غالب سیگنال VLP در شکل 1D منعکس شده است. ارجاع مشاهدات SWOT به این شکلموجها نیازمند شناسایی دقیق سرعت فاز و مکان منبع سیگنال VLP است.
سرعت فاز
برای محاسبه سرعت فاز موج ریلی، ما از یک مدل زمین ناهمگن استفاده میکنیم، همانطور که در مرجع 5 آمده است. برای به دست آوردن سرعت فاز سیگنال 10.88 میلیهرتز، ما از مدلهای سرعت LITHO1.0 10 میلیهرتز و 15 میلیهرتز درونیابی میکنیم14. با انتگرالگیری در طول مسیر بین آبدره دیکسون و ایستگاه II.ALE، ما میانگین سرعت فاز 4.0393 کیلومتر بر ثانیه را به دست میآوریم.
مکان منبع
به دلیل عدم قطعیت در سرعت فاز محاسبهشده، مکان منبع سیگنال VLP لزوماً توسط مرکز آبدره دیکسون مشخص نمیشود. در واقع، هر دو مرجع 4 و5 مکانهای منبعی را شناسایی میکنند که نزدیک آبدره هستند، اما خارج از آن. با استفاده از همان مدل زمین ناهمگن و یک روش Fast Marching برای شکلدهی پرتو (beamforming)، مکان منبعی در 92.4 کیلومتری مکان رانش زمین در 72.2 درجه شمالی و 25.1 درجه غربی شناسایی میشود5. این مکان منبع حدود 1409.5 کیلومتر از ایستگاه لرزهای II.ALE فاصله دارد. در ترکیب با سرعت فاز محاسبهشده، این امر منجر به زمان سفر 348.97 ثانیه میشود.
اعتبارسنجی با مشاهدات مصنوعی
برای آزمایش فرضیه خود مبنی بر مناسب بودن سرعت فاز و مکان منبع بهدستآمده با استفاده از مدل زمین ناهمگن برای نسبتدهی لرزهای، رویکرد خود را با یک تمرین مدلسازی پیشرو مستقل که در مرجع 5 انجام شده است، مقایسه میکنیم. با استفاده از شبیهسازی 3 متری HySEA از سیچ به عنوان تابع زمان منبع، توابع گرین سهجزئی مصنوعی با استفاده از سرویس وب Syngine محاسبه و با هم ترکیب میشوند تا سیگنالهای جابجایی را در ایستگاه II.ALE تقریب بزنند. برای همراستا کردن دو سیگنال، نویسندگان به صورت تجربی یک شیفت حدود 350 ثانیهای را شناسایی میکنند. این مقدار با زمان سفر 348.97 ثانیه که با استفاده از مدل زمین ناهمگن و شکلدهی پرتو (beam forming) محاسبه شده است، مطابقت دارد. این توافق بین دو روش کاملاً مستقل، اعتبار زمان سفر 348.97 ثانیهای موج ریلی به II.ALE را برای نسبتدهی لرزهای تأیید میکند.
عدم قطعیتهای لرزهای
در حالی که زمان سفر موج ریلی تخمین زده شده ما با تخمین تجربی مرجع 5 مطابقت خوبی دارد، این یک منبع مهم عدم قطعیت در تخمین دامنه سیچ است. هیچ رویکرد جامعی برای تعیین کمیت سرعت فاز موج ریلی یا عدم قطعیت مکان شکلدهی پرتو (beamforming) وجود ندارد26. از این رو، ما یک کران پایین برای تخمین عدم قطعیت خود با استفاده از اختلاف بین تخمین ما (348.97 ثانیه) و تخمین تجربی مرجع 5 (350 ثانیه) ارائه میدهیم. اگر یک دوره نوسان 92 ثانیهای را فرض کنیم، این امر منجر به خطای تقریبی 2.12 درصد میشود. عدم قطعیتهای بیشتری نیز وجود دارد به دلیل این واقعیت که در نزدیکی منبع نقطهای، فاز توسط یک تابع بسل (Bessel function) به جای یک تابع نمایی مختلط که مورد استفاده قرار گرفته است، کنترل میشود. در حالی که تخمین عدم قطعیتی که این امر ایجاد میکند دشوار است، اذعان به این نکته مهم است27. علاوه بر این، آزمایش مدلهای همگن زمین تخمینهای متفاوتی از مکان منبع و سرعتها را به دست آورد که نتایج متغیری را ایجاد کرد. ما توافق بین این مدلها و زمان سفر موج تخمینزده شده به صورت تجربی را به طور کلی بدتر یافتیم و بنابراین بیشتر به آنها نپرداختیم.
رگرسیون بیزی
تخمین شیب عرضی کانال و جزر و مد هر دو با استفاده از یک مدل خطی بیزی انجام میشود. انتخاب رویکرد بیزی، هدف ما را برای تعیین دقیق عدم قطعیت در پارامترهای تخمینزده شده و خود دادههای SWOT منعکس میکند. برخلاف تخمین حداقل مربعات متعارف و سایر واریانتهای فرکانسگرا که تخمینهای نقطهای از پارامترها را ارائه میدهند، رویکرد بیزی توزیعهای احتمالی پارامترها را در نظر میگیرد (و با آنها محاسبه میکند). با نمایش پارامترهای مورد علاقه ما به عنوان توزیعهای احتمالی، عدم قطعیت مرتبط با پارامترها در مدل ما به طور صریح نمایش داده میشود، بنابراین معیاری کالیبره شده از عدم قطعیت را بر روی متغیرهای هدف ارائه میدهد. همانطور که نشان داده خواهد شد، انتخاب پیشدانشهای مناسب میتواند مزایای بیشتری مانند انقباض پارامتر طبیعی و افزایش استحکام در برابر نویز را به همراه داشته باشد. انقباض (shrinkage) به کاهش بزرگی پارامترهایی اشاره دارد که در راهحل مشارکت ندارند. این امر مدلهای سادهتر را ترجیح میدهد مگر اینکه دادهها پیچیدگی بیشتری را توجیه کنند.
مدل خطی داده شده توسط \({y}_{i}={w}^{{\mathsf{T}}}{x}_{i}+{\epsilon }_{i}\) را در نظر بگیرید. در اینجا، yi امین اندازهگیری ارتفاع سطح دریا SWOT، w یک بردار از وزنهای تخمینزده شده (متناظر با ورودیهای ماتریس طراحی X)، xi امین ردیف یک ماتریس طراحی M×N به نام X، و ?i باقیمانده است. در اینجا، M تعداد کل اندازهگیریها و N تعداد توابع ورودی (که در ادامه توضیح داده میشوند) است. مدلهای خطی از این فرم برای تخمین شیب عرضی کانال و جزر و مد استفاده میشوند. همانطور که توضیح داده خواهد شد، در فرمولبندی بیزی ما، عناصر استنتاج شده بردار وزن w شکل توزیعهای مختلف مورد استفاده در مدل را کنترل میکنند. فرم پارامتری برای این توزیعها و توجیه آنها در ادامه به همراه رویه استنتاج واریانسدار به تفصیل ارائه شده است. رویه تخمین جزر و مد در بخش "تخمین جزر و مد" ارائه شده است.
احتمالپذیری (Likelihood)
احتمالپذیری p(Y|X, ?) احتمال وقوع دادههای مشاهدهشده را با توجه به مدل ما توصیف میکند. در اینجا، مدل هم توسط ماتریس طراحی و هم توسط مفروضات قبلی ما در مورد پارامترهای ? تعریف میشود. ما عبارت احتمالپذیری را به صورت گاوسی در نظر میگیریم، که معادل یک فرض خطای حداقل مربعات است. در تحلیل ما، مربع باقیمانده بین yi مشاهده شده و پیشبینی مدل را، با یک ابرپارامتر اسکالر ß وزن میدهیم، که نشاندهنده دقت یا معکوس (هم)واریانس نویز است. بحث و اعتبارسنجی این تصمیم مدلسازی در بافت تحلیل جزر و مد مبتنی بر SWOT در مرجع 20 ارائه شده است. این امر باعث میشود که مدل ما بر اساس میزان نویز دادهها، به چه میزان با دقت دادهها را برازش کند. این فرض منجر به یک عبارت احتمالپذیری گاوسی به شکل:
که در آن میبینیم احتمالپذیری تنها به w و ß بستگی دارد. تابع خطا Ey با رابطه زیر داده میشود:
پیشدانشها (Priors)
در قلب استنتاج بیزی، استفاده از پیشدانشها قرار دارد. پیشدانشها توزیعهایی بر روی پارامترهای موجود در یک مدل هستند و انتظار اولیه ما را از فرمهای تابعی و مقادیری که پارامترها باید داشته باشند، منعکس میکنند. در اینجا ما انتخاب این پیشدانشها را برای پارامترها و ابرپارامترها، و نحوه تأثیر آنها بر مدل حاصله، توصیف میکنیم. تحت تقریب میانگین میدان، ما فرض میکنیم که پیشدانش بر روی همه پارامترها ? میتواند به صورت زیر تجزیه شود:
که در آن a?=?{aj} مجموعهای از ابرپارامترها است که مقیاس گاوسی چندمتغیره روی وزنها w را کنترل میکند. اکنون هر عبارت را به صورت جداگانه بررسی میکنیم.
وزنهای مدل p(w|a) از یک پیشدانش گاوسی با میانگین صفر و دقتها (معکوس واریانس) a حاصل میشوند. این انتخاب دو هدف را دنبال میکند. اول، گاوسی کماطلاعترین توزیع برای کمیتی است که میتواند هم مثبت و هم منفی باشد، و بنابراین از این جهت بیطرف است29. این امر مهم است زیرا هم شیبهای عرضی کانال و هم دامنههای جزر و مد در ربع میتوانند مثبت یا منفی باشند. دوم، وزنها تنها در صورتی به طور قابل توجهی غیرصفر خواهند بود که دادهها آن را ضروری کنند. به طور متعارف، این به عنوان یک پیشدانش تعیین اهمیت خودکار (Automatic Relevance Determination) شناخته میشود، زیرا باعث انقباض (shrinkage) بر روی وزنهای مدل میشود که به طور قابل توجهی به مدل در برازش دادهها کمک نمیکنند. با استفاده از این، برای یک وزن منفرد wj، پیشدانش به شکل زیر است:
مجموعه دقتهای وزن a، که مقیاس وزنها w را کنترل میکند، از یک توزیع گاما (Gamma distribution) استخراج میشوند که توزیع دقتهای غیرمنفی را مدلسازی میکند. علاوه بر غیرمنفی بودن، این انتخاب به دلایل متعددی انجام شده است. اول، ابرپیشدانش گاما با پیشدانش گاوسی بر روی وزنها مزدوج است که هنگام انجام استنتاج مفید خواهد بود. یک پیشدانش مزدوج برای یک تابع احتمالپذیری معین، پیشدانشی است که منجر به توزیع پسین میشود که از همان خانواده پیشدانش است. یک پیشدانش گاما همچنین به طور ضمنی دامنههای وزن کوچکتر را تشویق میکند، که منجر به انقباض طبیعی و ترویج پراکندگی در وزنهای استنتاج شده میشود. ابر-ابرپارامترهای غیرمعنادار a0?=?10-2 و b0?=?10-4 که شکل و مقیاس گاما را تعیین میکنند، برای تولید یک پیشدانش مبهم بر روی هر aj به صورت زیر انتخاب شدهاند:
یک پیشدانش مبهم یا غیرمعنادار به سادگی به این معنی است که توزیع فرضشده گسترده است. این امر حداقل مفروضات را در مورد مقادیر پارامتر اعمال میکند، در حالی که هنوز انقباض پارامتر طبیعی را فراهم میکند30. این امر نسبت به یک پیشدانش یکنواخت که به طور ضمنی مقادیر پارامتر را محدود میکند و میتواند منجر به پسینهای نامناسب شود، ارجحیت دارد.
دقت نویز اسکالر ß (واریانس معکوس) باقیمانده ? نیز به عنوان یک ابرپارامتر در مدل مدلسازی میشود. با توجه به فرض حداقل مربعات یک باقیمانده گاوسی، ما بار دیگر یک پیشدانش گاما بر روی ß اتخاذ میکنیم. مقادیر پارامترهای شکل و مقیاس با مقادیری که در معادله (6) استفاده شدهاند، یکسان هستند، اما توسط ابر-ابرپارامترهای c0?=?10-2 و d0?=?10-4 به گونهای تعریف میشوند که:
راهاندازی
مدلها با استفاده از یک راهحل حداکثر احتمال (ML) راهاندازی میشوند به طوری که:
سپس از راهحل ML برای راهاندازی ابرپارامتر دقت باقیمانده، ß، به گونهای استفاده میشود که:
راهحل ML یک تخمین اولیه را ارائه میدهد که از احتمالپذیری (likelihood) پیروی میکند و اطمینان میدهد که ما از یک منطقه اطلاعاتی از فضای پارامتری شروع میکنیم. این برای راهاندازی دقت نویز، ß، مفید است و به بهروزرسانیهای واریانسدار از قرار گرفتن در مینیممهای محلی ضعیف جلوگیری میکند. در حالی که تضمینهای مطلق به ویژگیهای خاص مسئله بستگی دارد، راهاندازی ML یک روش اکتشافی (heuristic) شناختهشده است که ثبات و کارایی استنتاج واریانسدار را بهبود میبخشد.
استنتاج واریانسدار (Variational inference)
راهحلهای کاملاً بیزی با حاشیهسازی توزیعهای پسین پارامترها به دست میآیند. دشواری زمانی به وجود میآید که محاسبه توزیع پسین، که به صورت تحلیلی تقریباً همیشه غیرقابل حل است، انجام میشود. از این رو، رویکردهای مبتنی بر نمونه مانند مونت کارلو زنجیره مارکوف (Markov-Chain Monte Carlo) اغلب مورد استفاده قرار میگیرند. در حالی که این روشها در تقریب زدن توزیع پسین واقعی خوب هستند، مقیاس آنها با تعداد پارامترهای شامل شده به خوبی عمل نمیکند. علاوه بر این، ارزیابی همگرایی به راحتی امکانپذیر نیست. در اینجا، ما یک رویکرد استنتاجی تقریبی به نام بیز واریانسدار (variational Bayes)، که در اینجا به عنوان VB نامیده میشود، را اتخاذ میکنیم. VB یک جایگزین قابل محاسبه برای MCMC است که هم مقیاسپذیری و هم یک رویکرد اصولی برای ارزیابی دستیابی به همگرایی را به همراه دارد. این ویژگیها به ویژه برای رویه تخمین جزر و مد اهمیت دارند، زیرا با بیش از 300,000 مکان جداگانه، ارزیابی دستی همگرایی غیرقابل انجام است. هدف تحلیل ما استنتاج توزیعها بر روی عناصر جداگانه ? است. فرم تابعی این پسین به گونهای انتخاب میشود که با پیشین بر روی ? مزدوج باشد، به طوری که q(?|Y) به صورت زیر تجزیه شود:
این انتخاب از تقریب میانگین میدان (mean-field approximation) پیروی میکند که فرض میکند پارامترهای پنهان ما به طور متقابل مستقل هستند. این انتخاب عمدی است، زیرا امکان حاشیهسازی تحلیلی بر روی پسینهای پارامتر را فراهم میکند و استنتاج را از نظر محاسباتی کارآمد میسازد. با این حال، همبستگی بین پارامترها را نیز نادیده میگیرد، که به طور بالقوه عدم قطعیت را در حضور همبستگیهای قوی دستکم میگیرد. با وجود این، این رویکرد به طور گسترده برای استخراج روند و تخمین جزر و مد اعتبارسنجی شده است و بنابراین برای این وظایف کافی است20,29.
هدف ما در VB به حداقل رساندن تفاوت بین پسین تقریبی q(?|Y) و پسین واقعی p(?|Y) است. این تفاوت را میتوان با در نظر گرفتن مشاهدهپذیر ما، یعنی شواهد داده p(Y) ارزیابی کرد. با استفاده از پسین تقریبی ما، میتوانیم لگاریتم شواهد p(Y) را به صورت جمع دو جمله جداگانه بازنویسی کنیم به طوری که:
این معادله اساسی VB است و از دو جمله تشکیل شده است. جمله اول انرژی آزاد واریانسدار منفی (negative variational free energy) است که به آن کران پایین شواهد (evidence lower bound) نیز میگویند. این کران پایین سختگیرانهای برای شواهد مدل ارائه میدهد. جمله دوم واگرایی کولبک-لایبلر (Kullback-Liebler divergence) بین پسین تقریبی و واقعی بر روی ? است. این جمله باعث انقباض مدل طبیعی میشود زیرا با تعداد پارامترهای آزاد ? افزایش مییابد. مشاهده میشود که حداکثر کردن F(p, q) منجر به این میشود که پسین تقریبی تا حد امکان به پسین واقعی نزدیک باشد. به دلیل این واقعیت که q(?|Y) میتواند به صورت معادله (10) تجزیه شود، F(p, q) را میتوان با بهینهسازی تکراری هر یک از q(?|Y)، q(a|Y)، q(ß|Y) به صورت جداگانه حداکثر کرد. معادلات بهروزرسانی برای این رویه را میتوان در مرجع 31 یافت. یک پیادهسازی از این رویکرد را میتوان در نوتبوکهای "Fjord_Tides.ipynb" و "seismic_attribution.ipynb" یافت.
ضریب تعیین بیزی (Bayesian R-squared)
برای ارزیابی کیفیت رگرسیون بیزی، از ضریب تعیین بیزی (Bayesian R2) پیشنهادی در مرجع 15 استفاده میکنیم. این امر ضروری است زیرا واریانس مقادیر پیشبینی شده میتواند از واریانس دادهها بزرگتر باشد، بنابراین تعریف متعارف R2 را بیمعنی میکند. ضریب تعیین بیزی اصلاحشده به سادگی با رابطه زیر داده میشود:
که در آن Var(residual) واریانس مورد انتظار خطاها طبق مدل است.
تخمین جزر و مد
با توجه به پراکندگی شدید دادههای SWOT در دسترس (کمتر از 25 اندازهگیری در یک سال کامل)، هنگام انجام تحلیل هارمونیک جزر و مد، دقت بسیار زیادی لازم است20. تحلیل هارمونیک فرض میکند که جزر و مد را میتوان با برهمنهی امواج در فرکانسهای جزر و مد گسسته توصیف کرد. این فرکانسها در هارمونیکهای حرکات بین زمین، ماه و خورشید وجود دارند و به عنوان مؤلفهها توصیف میشوند. در مجموع، صدها مؤلفه ممکن وجود دارد، اما برای اهداف عملی تنها باید به چند مورد بپردازیم. با فرض n مؤلفه، kمین مؤلفه با فرکانس ?k دارای موج جزر و مد متناظر زیر است:
مقایسه مؤلفههای جزر و مد بر حسب دامنه \({C}_{k}=\sqrt{{A}_{k}^{2}+{B}_{k}^{2}}\) و فاز \({\phi }_{k}=\arctan {A}_{k}/{B}_{k}\) انجام میشود. تحلیل جزر و مد مدرن در حوزه زمان با استفاده از تخمین حداقل مربعات انجام میشود و بنابراین میتواند برای سریهای زمانی با نمونهبرداری نامنظم اعمال شود. برای دستیابی به این هدف، مسئله تخمین جزر و مد را به عنوان یک مدل خطی کلی تعریف میکنیم، به طوری که سطح دریا مشاهده شده، yi، در هر زمان با \({y}_{i}={w}^{{\mathsf{T}}}{x}_{i}+{\epsilon }_{i}\) داده میشود. در اینجا، xi ردیف iام یک ماتریس M×N از توابع پایه است که M تعداد اندازهگیریها و N?=?2n?+?1 است که n برابر با تعداد مؤلفهها است، w مجموعهای از وزنهای استنتاج شده است، و ?i باقیمانده غیر جزر و مدی است. از این رو، ما یک ماتریس طراحی X را تعریف میکنیم که با رابطه زیر داده میشود:
که در آن 1 مربوط به بایاس است و مقادیر باقیمانده مربوط به دامنههای ربع هستند. پراکندگی شدید سری مرجع آبدره دیکسون به حدی است که تنها جزر و مد غالب قمری، M2، میتواند به طور قابل اعتمادی تخمین زده شود، همانطور که در مرجع 18 نشان داده شده است. حتی با وجود اینکه ما فقط به M2 علاقهمند هستیم، لازم است مؤلفههای اضافی در تحلیل گنجانده شوند تا سهم مؤلفههای اضافی را "جذب" کنند18,20. پس از آزمایشات و اعتبارسنجیهای متعدد در برابر اندازهگیریهای درجا، مشخص شد که بهترین تخمین M2 با استفاده از مؤلفههای نیمهروزانه M2, N2, S2 و مؤلفههای روزانه K1 و O1 در تحلیل به دست آمده است. جدول تکمیلی 2 دورهها و منشأ هر مؤلفه را ارائه میدهد. بخش "اعتبارسنجی جزر و مد" به بحث در مورد اعتبارسنجی با مشاهدات CTD درجا و مدل جزر و مد FES2022 میپردازد.
تحلیل هارمونیک متعارف تنها اندازهگیریها را از یک مکان فضایی واحد در نظر میگیرد. به دلیل انسجام فضایی پاسخ اقیانوسی به نیروی جزر و مدی32، این رویه اطلاعات قابل توجهی را نادیده میگیرد. دادههای SWOT تصویر کاملی از ارتفاع لحظهای سطح دریا در سراسر آبدره دیکسون را ارائه میدهند که با استفاده از یک روش مناسب قابل بهرهبرداری است. در اینجا، ما رویه تحلیل هارمونیک از لحاظ فضایی منسجم در مرجع 20 را اتخاذ میکنیم. خوانندگان برای شرح کامل این رویه به مرجع 20 ارجاع داده میشوند. با این حال، ایده اصلی این است که دامنههای ربع را در مجموعهای از نقاط مجاور به طور همزمان تخمین بزنیم، با فرض اینکه دامنه در هر نقطه Pj,k توسط دامنه w0,0 نقطه مرکزی P0,0 با یک آفست کوچک به نام wj,k داده میشود. مدل خطی میتواند به صورت زیر بسط داده شود:
که در آن Yj,k مشاهده در نقطه Pj,k است، X0,0 و Xj,k به ترتیب ماتریسهای طراحی برای نقاط P0,0 و Pj,k هستند، و ? احتمال همبستگی مشاهدات Yj,k با y0,0 را نشان میدهد. اسکالر ? با تبدیل فیشر ضریب همبستگی پیرسون r بین Y0,0 و Yj,k به دست میآید، به طوری که \({z}^{{\prime} }=.5[\ln (1+r)-\ln (1-r)]\)، و \(\rho=1-\Phi ({z}^{{\prime} })\) با \(\Phi={{{\mathcal{N}}}}(0,1)\). با گنجاندن این احتمال که مشاهدات همبسته هستند، ?، ما فرضی را اعمال میکنیم که نقاط با سریهای زمانی مشابهتر، جزر و مد مشابهی خواهند داشت. علاوه بر این، در حدی که Yj,k?=?Y0,0، دامنه ربع Yj,k?=?X0,0w0,0. ما میتوانیم فرم تابعی رابطه بین مکانهای مجاور را بیشتر محدود کنیم تا نسبت داده به پارامترها را افزایش دهیم. همانطور که در مرجع 20 اعتبارسنجی شده است، ما رابطه بین دامنههای ربع در مکانهای مجاور را به صورت خطی تقریب میزنیم، به طوری که:
که در آن dx و dy فواصل نرمالشده بین نقاط در جهت افقی و عمودی هستند که برای راحتی هنگام استفاده از دادههای شبکهبندیشده SWOT، به ترتیب (-1، 0، 1) در نظر گرفته شدهاند. این رویکرد به طور موثر نسبت داده به پارامترها را دو برابر میکند و مشخص شد که تخمین عدم قطعیت را بهبود میبخشد20. به دلیل استفاده از دادههای شبکهبندیشده با وضوح 100 متر، فرض خطی بودن بین دامنههای ربع مجاور بیش از اندازه کافی است.
در حالی که تحلیل هارمونیک با انسجام فضایی میتواند در کنار هر تخمینگر دیگری استفاده شود، در اینجا ما از تخمینگر بیزی واریانسدار (VB) که در بخش "رگرسیون بیزی" توضیح داده شد، استفاده میکنیم. این انتخاب بر اساس دلایل زیر است: اولاً،20 نشان میدهد که رویکرد VB به نویزهای ایستا (گاوسی) و غیرایستا حساسیت کمتری دارد. دوم، VB انقباض پارامتر طبیعی را فراهم میکند که برای کاهش "تداخل" بین مؤلفههای خارج از تحلیل مفید است. در نهایت، اطلاعات عدم قطعیت ضمنی برای ارزیابی کیفیت تخمینهای جزر و مد مفید است. تحلیل نشان داده شده در شکل 4 تنها شامل مکانهایی است که حداقل 23 مشاهده دارند. شکل تکمیلی 4 توزیع اندازهگیریهای SWOT را نشان میدهد که میتوان از آنها برای تخمین جزر و مد در سراسر آبدره استفاده کرد. پیادهسازی کامل این رویکرد و کدهای لازم برای بازتولید تمام تخمینهای جزر و مد در "Fjord_Tides.ipynb" موجود است.
اعتبارسنجی جزر و مد
اعتبارسنجی جزر و مد برای هر دو تخمینهای جزر و مد مشتق شده از SWOT و تخمینهای جزر و مد استاندارد از FES202233 با استفاده از ایستگاه درجا (in-situ) CTD به عنوان حقیقت زمین (ground truth) انجام میشود34. برای هر مؤلفه k، مدلها (VB یا FES) با استفاده از خطای میانگین مربعات (root-mean-squared error) ارزیابی میشوند، که به صورت زیر تعریف شده است:
که در آن خط بالای عبارت نشاندهنده میانگینگیری در یک چرخه کامل (مثلاً 0? 2p) است. این معیار خطای ترکیبی در ارتفاع سطح دریا پیشبینی شده ناشی از خطاهای دامنه و فاز را منعکس میکند. ما همچنین یک معیار ثانویه، خطای RMS نسبی (relative RMS error)، را معرفی میکنیم که خطای RMS را نسبت به بزرگی مؤلفه ایستگاه CTD، RRMSk?=?RMSk/Ak,CTD، وزندهی میکند. مقایسهها بین RMS و خطای RMS نسبی در شکل تکمیلی 6 ارائه شده است. برای تخمینهای SWOT، از میانگین دامنه و فاز کل آبدره استفاده میشود. همانطور که در بالا اشاره شد، ما فقط مؤلفههای M2, N2, S2, K1 و O1 را به دلیل محدودیت دادههای SWOT در تحلیل گنجاندهایم. برای این مؤلفهها، میتوان دید که M2 بهبودهای قابل توجهی نسبت به FES2022 با 52% ارائه میدهد. N2, S2, K1 و O1 مشتق شده از SWOT در مقابل، به دلیل دامنههای کوچکتر و دورههای همپوشانی طولانیتر، نسبتاً غیردقیق هستند. نتایج مشابهی برای دادههای اولیه SWOT توسط مرجع 18 یافت شده است. در کار آنها، مؤلفههای اضافی نیز برای دستیابی به دقت برتر M2 گنجانده شده بودند. هنگام تصحیح دادههای SWOT، ما فقط از M2 از SWOT، در کنار S2, N2, O1 و K1 از FES2022 استفاده میکنیم. همانطور که در پنل RMS نسبی مشاهده میشود، بسیاری از مؤلفههای اضافی FES2022 بیش از 20% خطای RMS نسبی در آبدره دیکسون را نشان میدهند. برای جلوگیری از معرفی سوگیریهای احتمالی از تصحیحات جزر و مد نادرست، ما مؤلفههایی را که از این آستانه 20% فراتر میروند، لحاظ نمیکنیم. برای مبارزه با هرگونه تغییرپذیری باقیمانده جزر و مد، در عوض مرکز نقشه رنگی را نقطه میانی شیب عرضی کانال تعریف میکنیم.
توجه به این نکته مهم است که تغییرات فصلی بزرگی در جزر و مد در مناطق قطبی وجود دارد35. به دلیل محدودیت دادههای SWOT در دسترس و استقرار نسبتاً کوتاه ایستگاه CTD (حدود 2 ماه)، وسعت این تغییرپذیری دشوار است. با این حال، از آنجایی که ایستگاه CTD در طول هر دو رویداد مستقر شده بود، اعتبارسنجی با این ایستگاه مناسب است، زیرا ما خواهان تخمینهای دقیق جزر و مد در طول این دوره هستیم. با در دسترس قرار گرفتن دادههای بیشتر SWOT، دقت تخمینهای جزر و مد بهبود خواهد یافت. بعید نیست که این تخمینهای بهبود یافته نتایج این مطالعه را تغییر دهند، زیرا ما عمدتاً به شیب عرضی کانال علاقهمندیم و هیچ شواهدی مبنی بر اینکه این شیب ناشی از جزر و مد است، بر اساس بررسی جزر و مد M2، پیدا نمیکنیم. با این حال، تخمین بهبود یافته جزر و مد میتواند برای درک چگونگی تعدیل دوره سیچ توسط خود جزر و مد و در نتیجه تأثیر آن بر دینامیک و اتلاف آن مفید باشد.
سیچ تحلیلی ساده
برای تخمین دامنه کلی سیچ و ارتباط رویدادهای سپتامبر و اکتبر با استفاده از مشاهدات لرزهای، یک سیچ نظری را در نظر میگیریم که بر روی یک هندسه آبدره سادهشده عمل میکند. ما برای سازگاری، از نمادگذاری و هندسه آبدره استفادهشده در مرجع 5 استفاده میکنیم. در اینجا، فرض میکنیم که سیچ به عنوان یک نیروی افقی نوسانی که در جهت N160°E (عمود بر آبدره دیکسون) عمل میکند. به دلیل تفاوتها در هندسههای تعریفشده در مراجع 4، 5 از تعیین مقادیر دقیق ابعاد آبدره خودداری میکنیم مگر در موارد ضروری. نوسان سیچ باعث تغییر مرکز جرم توده آب x میشود و میتوان آن را به صورت زیر نوشت:
در اینجا ?x دامنه نوسان افقی و ??˜?2p/92 هرتز فرکانس نوسان است. همانطور که در مرجع 5 توضیح داده شده است، دامنه امواج ریلی تولید شده متناسب با بزرگی نیروی افقی است. از این رو، ?x را بر حسب نیروی کل F مینویسیم. با گرفتن مشتق دوم از موقعیت مرکز جرم، به رابطه زیر میرسیم:
همانطور که مشاهده میشود، حداکثر نیرو در حداکثر جابجایی ?x مرکز جرم رخ میدهد. با استفاده از دادههای SWOT تنها میتوانیم شیب عرضی کانال را مشاهده کنیم. بنابراین، ارتباط نیرو به جابجایی سطح ?z به صورت زیر مفید است:
معادله (19) میتواند بر حسب جابجایی عمودی ?z به صورت زیر بازنویسی شود:
میدانیم که جابجایی سطح ?z?=?SL است، که S شیب عرضی کانال است. بنابراین، نیروی F میتواند بر حسب شیب عرضی کانال به صورت زیر نوشته شود:
بنابراین، نشان دادیم که نیرو مستقیماً متناسب با شیب عرضی کانال است. این امکان مقایسه مستقیم بین رویدادها را فراهم میکند.
اندازهگیریهای درجا (In situ)
اندازهگیریهای درجا (in-situ) توسط ایستگاه CTD واقع در قسمت داخلی آبدره دیکسون (همانطور که در شکل 1A نشان داده شده است) ارائه شده و در مرجع 34 قابل دسترسی است. این ایستگاه هر دو متغیر استاندارد هواشناسی و اقیانوسی را ارائه میدهد. اندازهگیر CTD بر روی دیوار آبدره، درون یک لوله HDPE نصب شده است تا در زمستان از یخ محافظت شود. در اینجا، ما تنها از اندازهگیریهای سرعت و جهت باد، چگالی، و عمق آب استفاده میکنیم. دادهها در فواصل 15 دقیقهای نمونهبرداری میشوند، که مشکلات همپوشانی شدیدی را برای مشاهده سیگنال VLP 92 ثانیهای ایجاد میکند. به دلیل موقعیت دستگاه در آبدره داخلی، بزرگی سیگنال سیچ پس از تنها چند ساعت به زیر سطوح نویز قبل از رویداد کاهش مییابد و بنابراین در دادهها قابل مشاهده نیست (به شکل تکمیلی 5 مراجعه کنید).
آبدره دیکسون
در اینجا خلاصهای کوتاه از آبدره دیکسون ارائه میشود. شرح جامعتری از فیزیوگرافی و آب و هوای سیستم آبدره را میتوان در مرجع 5 یافت. آبدره دیکسون در انتهای یخچال طبیعی هیسینگر در شمالیترین منطقه سیستم آبدره کنگ اسکار واقع در شرق گرینلند قرار دارد (به شکل تکمیلی 1 مراجعه کنید). خود آبدره در عمق دایره قطب شمال قرار دارد و بنابراین در بیشتر سال با یخ دریایی مشخص میشود. یخ دریایی در ماه ژوئیه از بین میرود و سپس در ماه اکتبر دوباره تشکیل میشود. آبدره یک حوضه دره U شکل را پر میکند، با چندین یخچال طبیعی کوچکتر در هر طرف. طول خود آبدره 38 کیلومتر و عرض آن بین 2.5 تا 3.2 کیلومتر است. عمق آن از 150 تا 200 متر تا 700 متر از غرب به شرق متغیر است، با عمق تقریبی 540 متر در مرکز آبدره روبروی مکان رانش زمین. تخمینهای عمق از یک بررسی در سال 2018 توسط اداره آبنگاری ملی دانمارک با وضوح 15 متر گرفته شده است. ما خاطرنشان میکنیم که هیچ دادهای بین 150 و 300 متر از ساحل به دلیل محدودیتهای کشتی بررسی وجود ندارد. این دادههای گمشده عدم قطعیتهای زیادی را در این مناطق ایجاد میکند که میتواند به طور قابل توجهی شبیهسازیهای عددی را تحت تأثیر قرار دهد.
اطلاعات سونامی
هر دو سونامی از رانش زمینهایی که در همان شیب زیر یک یخچال طبیعی بینام رخ دادند، سرچشمه گرفتند5. این رانشهای زمین در اثر کاهش پشتیبانی یخچال طبیعی به دلیل نازک شدن یخ طی دهه گذشته ایجاد شدهاند. مشاهده مستقیم زخمهای رانش زمین و کثیف شدن یخچال طبیعی با استفاده از تصاویر ماهوارهای توسط هر دو مرجع 4 و5 این نظریه را تأیید میکند. علاوه بر این، مرجع 5 دینامیک رانش زمین 16 سپتامبر را از طریق وارونگی لرزهای ارزیابی میکند. در حالی که رویداد 11 اکتبر باعث ایجاد یک زخم جدید از رانش زمین نشد، یک تصویر سنتینل-2 فرسایش به مراتب بیشتری را نسبت به آنچه پس از رویداد 16 سپتامبر وجود داشت، نشان داد.
شواهد تجربی دو سونامی با ترکیبی از حسگرهای درجا (in-situ) نزدیک و ارتفاع بالاآمدگی (run-up) مشاهده شده ارائه میشود. با استفاده از تصاویر ماهوارهای، هر دو مرجع 4 و5 ارتفاع اولیه بالاآمدگی 200 متری را در نزدیکی مکان رانش مشاهده میکنند، با میانگین 60 متر بالاآمدگی در بقیه آبدره برای رویداد 16 سپتامبر. بالاآمدگی سونامی برای رویداد 11 اکتبر تنها 200 متر غرب شیب و تقریباً 75 درصد از بزرگی رویداد سپتامبر در این مکان (60 متر در مقابل 80 متر) مشاهده شد. تقریباً 72 کیلومتر دورتر در ایستگاه تحقیقاتی الا \(\varnothing\)، ارتفاع اولیه بالاآمدگی بیش از 4 کیلومتر بود که خسارت محلی قابل توجهی ایجاد کرد. مکان الا \(\varnothing\) نسبت به آبدره دیکسون در شکل تکمیلی 1 نشان داده شده است. تا جایی که میدانیم، هیچ اطلاعاتی در مورد بالاآمدگی در الا \(\varnothing\) برای رویداد 11 اکتبر به دلیل تاریکی زمستانی قطب شمال وجود ندارد.
تعدیل جزر و مدی سیچ
در حالی که نتایج زیر بر نتیجهگیریهای این مقاله در مورد اندازه اولیه سیچ تأثیری ندارند، اما به یک مکانیسم جالب اتلاف سیچ اشاره میکنند. نویسندگان مرجع 4 یک تعدیل حدود 6 ساعته در فرکانس سیچ را از 10.874 تا 10.879 میلیهرتز مشاهده کردند که آن را به تأثیرات جزر و مدی نسبت میدهند (شکل تکمیلی S1C). آنها یک مکانیسم احتمالی را تغییر عمق در تعدیل سرعت موج c از طریق رابطه \(c=\sqrt{gH}\) پیشنهاد میکنند که در آن g شتاب گرانش و H عمق است. با این حال، یک بررسی ساده از هر دو سیگنال VLP سپتامبر و اکتبر نشان میدهد که سیچ در واقع به شیوه مخالف (یعنی دورههای طولانیتر در جزر و مد بالاتر) رفتار میکند. ما در اینجا مکانیسم جایگزینی را پیشنهاد میکنیم: طبقهبندی (stratification). در حوضههای نیمهبسته (که دارای یک مرز باز برای انتشار امواج به دریا تعریف شدهاند)، سرعت موج سیچ توسط طبقهبندی از طریق \(\sqrt{gH\Delta \rho /\rho }\) تعدیل میشود که در آن ? چگالی متوسط و ??=?2??1 اختلاف چگالی از بالا (?1) به پایین (?2) است36. بررسی همبستگی بین ارتفاع سطح آب و چگالی ? همبستگی مثبت قوی را نشان میدهد (شکل تکمیلی 7). بر اساس این مشاهده، ما توضیح زیر را پیشنهاد کردیم. در جزر، ستون آب به شدت طبقهبندی شده است به طوری که روانابهای تازه (کمچگالی) یخچالهای طبیعی در بالا و آب شور چگالتر در زیر قرار دارند (??>1). با بالا آمدن جزر و مد، ستون آب مخلوط میشود و منجر به مشاهده چگالی بالاتر ? در سطح و در نتیجه طبقهبندی کمتر میشود (??<1). با توجه به اینکه آبدره بسیار عمیق است (حدود 500 متر)، تأثیر ???»?H همانطور که مشاهده شد. با توجه به اینکه ایستگاه CTD تنها مشاهدات سطحی را ارائه میدهد، امکان نتیجهگیری قطعی مبنی بر اینکه نوسانات چگالی مشاهده شده نشاندهنده طبقهبندی بین ?1 و ?2 است، وجود ندارد. از این رو، مطالعه شبیهسازی بیشتر برای اعتبارسنجی این فرضیه مورد نیاز است.
دسترسی به دادهها
تمام دادههای استفاده شده در این مطالعه در یک مخزن Zenodo همراه با کد پردازش و تولید هر شکل و نمودار و سایر محتوای بصری مربوط به مقاله در دسترس قرار گرفته است: https://doi.org/10.5281/zenodo.1516649137. دادههای SWOT L2 HR به صورت رایگان از طریق PO.DAAC 10.5067/SWOT-PIXC-2.0 قابل دسترسی هستند38.
دسترسی به کد
تمام کدهای لازم برای بازتولید تحلیل ارائهشده را میتوان در مخزن Zenodo (https://doi.org/10.5281/zenodo.15166491) و همچنین در مخزن اختصاصی Code Ocean (https://codeocean.com/capsule/5272497/tree) یافت.
منابع
Diffenbaugh, N. S. et al. Quantifying the influence of global warming on unprecedented extreme climate events. Proc. Natl. Acad. Sci. 114, 4881–4886 (2017).
Overland, J. E. Arctic climate extremes. Atmosphere 13, 1670 (2022).
Landrum, L. & Holland, M. M. Extremes become routine in an emerging new arctic. Nat. Clim. Chang. 10, 1108–1115 (2020).
Carrillo-Ponce, A. et al. The 16 september 2023 Greenland megatsunami: analysis and modeling of the source and a week-long, monochromatic seismic signal. Seism. Rec. 4, 172–183 (2024).
Svennevig, K. et al. A rockslide-generated tsunami in a Greenland fjord rang Earth for 9 days. Science 385, 1196–1205 (2024).
Rabinovich, A. B. Seiches and harbor oscillations. In Handbook of Coastal and Ocean Engineering 193–236 (World Scientific, 2010).
Amundson, J. M. et al. Observing calving-generated ocean waves with coastal broadband seismometers, Jakobshavn Isbræ, Greenland. Ann. Glaciol. 53, 79–84 (2012).
Macías, J., Escalante, C. & Castro, M. J. Multilayer-HySEA model validation for landslide-generated tsunamis–Part 1: rigid slides. Nat. Hazards Earth Syst. Sci. 21, 775–789 (2021).
Chelton, D. B., Ries, J. C., Haines, B. J., Fu, L.-L. & Callahan, P. S. Satellite altimetry. In International Geophysics Vol. 69, 1 (Elsevier, 2001).
Abdalla, S. et al. Altimetry for the future: building on 25 years of progress. Adv. Space Res. 68, 319–363 (2021).
Morrow, R. et al. Global observations of fine-scale ocean surface topography with the surface water and ocean topography (SWOT) mission. Front. Mar. Sci. 6, 232 (2019).
Fjørtoft, R. et al. Karin on SWOT: characteristics of near-nadir Ka-band interferometric SAR imagery. IEEE Trans. Geosci. Remote Sens. 52, 2172–2185 (2013).
Fu, L.-L. et al. The surface water and ocean topography mission: a breakthrough in radar remote sensing of the ocean and land surface water. Geophys. Res. Lett. 51, e2023GL107652 (2024).
Pasyanos, M. E., Masters, T. G., Laske, G. & Ma, Z. Litho1. 0: an updated crust and lithospheric model of the Earth. J. Geophys. Res. Solid Earth 119, 2153–2173 (2014).
Gelman, A., Goodrich, B., Gabry, J. & Vehtari, A. R-squared for Bayesian regression models. Am. Stat. 73, 307–309 (2019).
Caceres, M., Valle-Levinson, A. & Atkinson, L. Observations of cross-channel structure of flow in an energetic tidal channel. J. Geophys. Res. Oceans 108, C4 (2003).
Cottier, F. et al. Arctic fjords: a review of the oceanographic environment and dominant physical processes. Geol. Soc., Lond. Spec. Publ. 344, 35–50 (2010).
Hart-Davis, M. et al. Tides in complex coastal regions: early case studies from wide-swath swot measurements. Geophys. Res. Lett. 51, e2024GL109983 (2024).
Stammer, D. et al. Accuracy assessment of global barotropic ocean tide models. Rev. Geophys. 52, 243–282 (2014).
Monahan, T., Tang, T., Roberts, S. & Adcock, T. A. Tidal corrections from and for swot using a spatially coherent variational bayesian harmonic analysis. J. Geophys. Res. Oceans 130, e2024JC021533 (2025).
Price, J. F., Weller, R. A. & Schudlich, R. R. Wind-driven ocean currents and Ekman transport. Science 238, 1534–1538 (1987).
Rantanen, M. et al. The Arctic has warmed nearly four times faster than the globe since 1979. Commun. Earth Environ. 3, 168 (2022).
Krischer, L. et al. Obspy: a bridge for seismology into the scientific Python ecosystem. Comput. Sci. Discov. 8, 014003 (2015).
Scripps Institution of Oceanography. Global seismograph network-IRIS/IDA. International Federation of Digital Seismograph Networks (1986).
Albuquerque Seismological Laboratory (ASL)/USGS. Global seismograph network (gsn-iris/usgs). International Federation of Digital Seismograph Networks (1988).
Xu, Z. & Mikesell, T. D. Estimation of resolution and covariance of ambient seismic source distributions: full waveform inversion and matched field processing. J. Geophys. Res. Solid Earth 127, e2022JB024374 (2022).
SATO, R. Seismic waves in the near field. J. Phys. Earth 20, 357–375 (1972).
Fox, C. W. & Roberts, S. J. A tutorial on variational Bayesian inference. Artif. Intell. Rev. 38, 85–95 (2012).
Roberts, S., McQuillan, A., Reece, S. & Aigrain, S. Astrophysically robust systematics removal using variational inference: application to the first month of Kepler data. Mon. Not. R. Astron. Soc. 435, 3639–3653 (2013).
Ruanaidh, J. J. O. & Fitzgerald, W. J. Numerical Bayesian Methods Applied to Signal Processing (Springer Science & Business Media, 2012).
Penny, W. & Roberts, S. Bayesian multivariate autoregressive models with structured priors. IEE Proc. Vis. Image Signal Process. 149, 33–41 (2002).
Monahan, T., Tang, T. Adcock, T.A.A. S. R. RTide: Automating the tidal response method, Accepted for publication in Journal of Geophysical Research: Machine Learning and Computation. https://doi.org/10.1029/2024JH000525 (2024) .
CNES. Fes2022 (Finite Element Solution) Ocean Tide (Version 2022). The FES2022 Tide product was funded by CNES, produced by LEGOS, NOVELTIS, and CLS, and made freely available by AVISO (2024).
Boone, W. et al. Greenland Integrated Observatory—CTD & Atmospheric Station Dickson Fjord—2023. https://doi.org/10.14284/637 (2023).
Bij de Vaate, I., Vasulkar, A., Slobbe, D. & Verlaan, M. The influence of Arctic landfast ice on seasonal modulation of the M2 tide. J. Geophys. Res. Oceans 126, e2020JC016630 (2021).
Cushman-Roisin, B., Willmott, A. J. & Biggs, N. R. Influence of stratification on decaying surface seiche modes. Cont. Shelf Res. 25, 227–242 (2005).
Monahan, T. Observations of the seiche that shook the world (replication materials). https://doi.org/10.5281/zenodo.15166491 (2025).
Surface Water Ocean Topography (SWOT). SWOT Level 2 Water Mask Pixel Cloud Auxiliary Data Product, Version C (2024). https://doi.org/10.5067/SWOT-PIXCVEC-2.0. Ver. C. PO.DAAC, CA, USA. Dataset accessed 07 April 2025.
Met Office. Cartopy: a Cartographic Python Library With A Matplotlib Interface. Exeter, Devon (2010–2015). https://scitools.org.uk/cartopy.